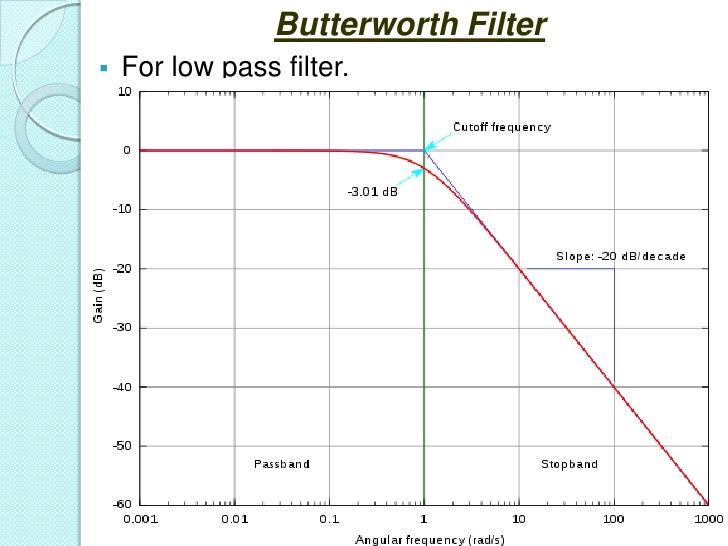
Butterworth-Filter sind kontinuierliche Frequenzfilter, die so ausgelegt sind, dass der Frequenzgang für einen Tiefpass unterhalb der Grenzfrequenz ωg möglichst lange horizontal verläuft (für einen Hochpass gilt umgekehrt dasselbe). Erst kurz vor dieser Grenzfrequenz soll die Übertragungsfunktion absinken und in die Durchlassdämpfung von n·20 dB pro Frequenzdekade übergehen (n ist die Ordnung des Butterworth-Filters). Die einfachste Form des Butterworth-Filters 1. Ordnung stellt das RC-Glied dar. Eine moderne praktische Anwendung des Filters ist in der Computeranimation üblich; sie dient der Reduktion von Kurvenpunkten, ohne die generelle Form der Kurve zu verändern.
Ein Signal wird an der Grenzfrequenz auf das -fache des ursprünglichen Signals abgeschwächt, d. h. die Dämpfung bei der Grenzfrequenz beträgt ca. 3 dB. Butterworth-Filter haben sowohl im Durchlassbereich als auch im Sperrbereich einen gleichmäßigen (glatten) Verlauf der Übertragungsfunktion.
Benannt wurde das Butterworth-Filter nach dem britischen Physiker Stephen Butterworth, der diese Art von Filter erstmals beschrieb.
Übertragungsfunktion
Daraus ergibt sich als Forderung an die Übertragungsfunktion:
mit
- Gleichspannungsverstärkung
- auf Grenzfrequenz normierte Frequenz
- Ordnung des Filters
Durch Koeffizientenvergleich mit der allgemeinen Übertragungsfunktion ergeben sich die Koeffizienten des Butterworth-Filters.
Koeffizienten
Bringt man die Übertragungsfunktion in die normierte Form ():
ergeben sich für die Koeffizienten und folgende Beziehungen:
Ordnung n des Filters gerade:
Ordnung n des Filters ungerade:
Eigenschaften
Das Butterworth-Filter besitzt folgende Eigenschaften:
- monotoner Amplitudengang sowohl im Durchlass- als auch im Sperrbereich
- schnelles Abknicken bei der Grenzfrequenz, verbessert sich mit der Ordnung
- beträchtliches Überschwingen bei der Sprungantwort, verschlechtert sich mit der Ordnung
- der Phasenverlauf besitzt eine kleine Nichtlinearität
- relativ frequenzabhängige Gruppenlaufzeit
- großer Realisierungsaufwand bei hoher Ordnung
Filterrealisierung
Das Butterworth-Filter mit einer gegebenen Übertragungsfunktion kann in folgender Form realisiert werden:
Das k-te Element ist gegeben mit:
- für k ungerade
- für k gerade
In der digitalen Signalverarbeitung können Butterworth-Filter durch Wahl entsprechender Filterkoeffizienten in IIR-Filtern (rekursive Filterstruktur) realisiert werden. Die Kaskadierung zweier Butterworth-Filter n-ter Ordnung ergibt einen Linkwitz-Riley-Filter 2n-ter Ordnung.
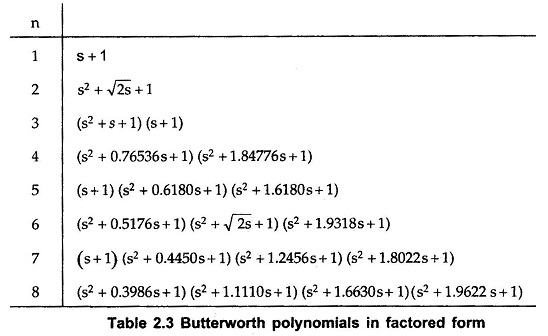
Normalisierte Butterworth-Polynome
Die Butterworth-Polynome werden normalerweise als komplex konjugierte Pole s1 und sn geschrieben. Die Polynome sind zusätzlich um den Faktor ωc=1 normalisiert. Die normalisierten Butterworth-Polynome haben somit die folgende Form:
- für n gerade
- für n ungerade
Auf 4 Dezimalziffern genau lauten sie:
Einzelnachweise
Siehe auch
- Bessel-Filter
- Cauer-Filter
- Tschebyscheff-Filter
- Linkwitz-Riley-Filter
Weblinks
- Analogfilter, Othmar Marti and Alfred Plettl, Universität Ulm
- Online Butterworth Tiefpassfilter Rechner